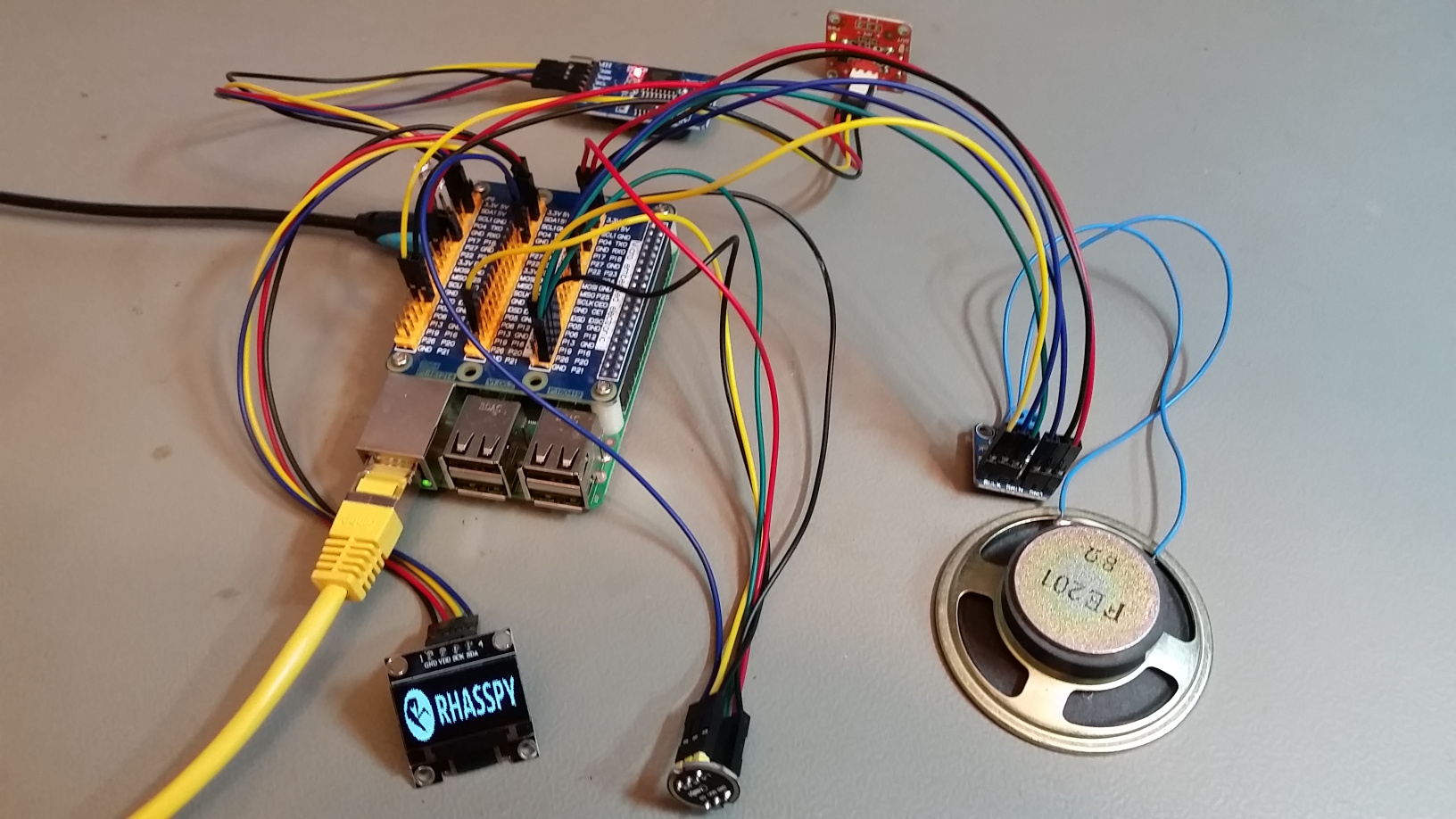
This is my current Rhasspy development setup. Actually I am working on a complex robot with many already started developments. As voice input and output Snips were planned until Sonos destroyed this plan. Fortunately, I have to say. With the speed and direction in which Rhasspy is evolving it will fit much better than Snips have ever done in the foreseeable future. On the table you can see a small experimental part only for Rhasspy. The system consists of a Raspberry Pi 3 Model B+ with a real time clock (I2C), a shutdown switch (GPIO) and an OLED display (ISP) with some static advertising for Rhasspy.  The audio part is still in development. It is a highly sensitive digital MEMS microphone and a Audio DAC both attached to the I2S bus of the Raspberry SOC chip. The driver with the ALSA configuration still needs some love. As soon as I get it to run stable I document the whole thing and publish it here. On the internet I haven’t found a usable solution with both components together. It costs only a few dollars and provides very good audio features.
The audio part is still in development. It is a highly sensitive digital MEMS microphone and a Audio DAC both attached to the I2S bus of the Raspberry SOC chip. The driver with the ALSA configuration still needs some love. As soon as I get it to run stable I document the whole thing and publish it here. On the internet I haven’t found a usable solution with both components together. It costs only a few dollars and provides very good audio features.
Very cool! Love the “advertising” too
What sorts of things will your robot do?
Thanks! 
It is a humanoid robot that can walk on two legs. Currently it has 18 servos later up to 24. Many parts are made of PET-G with my 3D printer. The movements are controlled by a STM32F103 Cortex M3 processor. There are some sensors like laser distance meter acceleration sensor etc. The main processor is a Raspberry Pi 3. Some Python3 programs as service are already available and communicate via MQTT. As voice input and output Rhasspy is planned and fits perfectly into my concept thanks growing MQTT support. At the beginning I am glad if the control of the robot by voice works well. In the long run the project aims at an AI unit and the robot should be able to perform certain tasks on its own. A camera as eyes is already available but it is still a long way to go.
Salut Thinker et Synesthesiam,
I did a similar project, inspired by ‘French Poppy robot’ but with other servos and odroid Xu4.
You can offer them Rhasspy they are looking for open source.
My Poppy also works with Rhasspy, sending mqtt to an Orangepi and Plcbus server

welcome kookic,
your robot is impressively large and looks very beautiful!  Can he walk on his own without help? Nice to read that you also use mqtt. I find it is a very practical protocol.
Can he walk on his own without help? Nice to read that you also use mqtt. I find it is a very practical protocol.
Good evening,
Thanks for him.
No, he not walk alone, but he speaks thanks to Rhasspy